Human-tracking for Autonomous vehicles
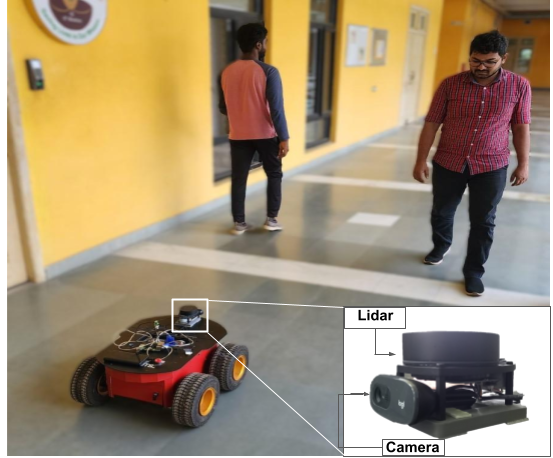
This was my B.Tech project which culminated into a Journal paper, published in IEEE Sensor Letters. It presents a novel human tracking and position estimation approach for mobile robot navigation that integrates a 2D LiDAR and monocular camera.
Omni-Wheeled Drawing Robot
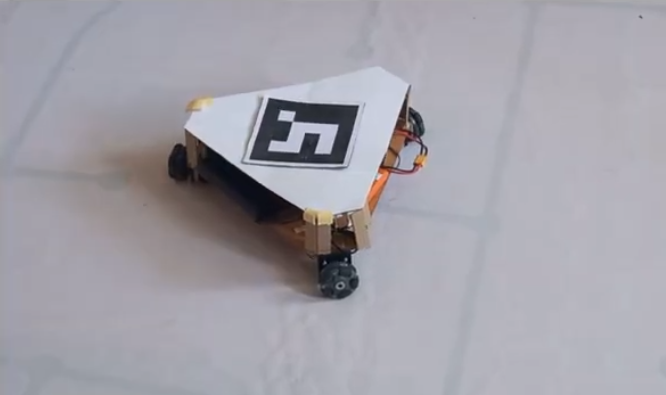
This was my first robotics competition during which we designed and built an omniwheel robot
equipped with an overhead camera-based localization system. We achieved precise control
that allows the robot to draw complex shapes and figures autonomously, completing intricate
patterns based on waypoint sequences.
Self-Balancing Bike Robot
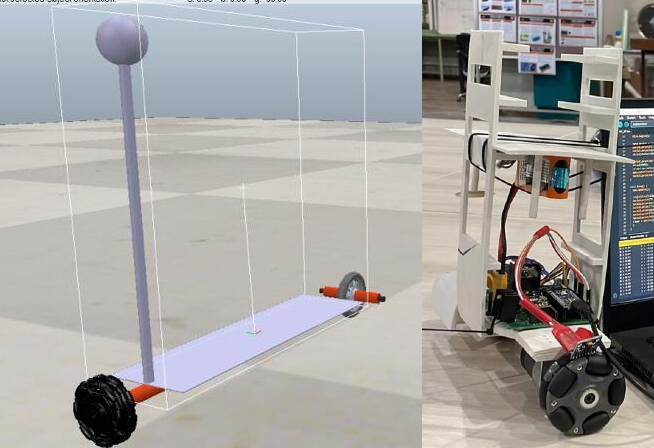
In my second robotics competition, we were tasked with building a self-balancing bike robot.
The unique configuration of the system made it both intriguing and challenging.
We tackled this challenge by implementing an LQR controller, leveraging data from the IMU and encoders.
Multi-Robot Path Planning for Warehouse Logistics
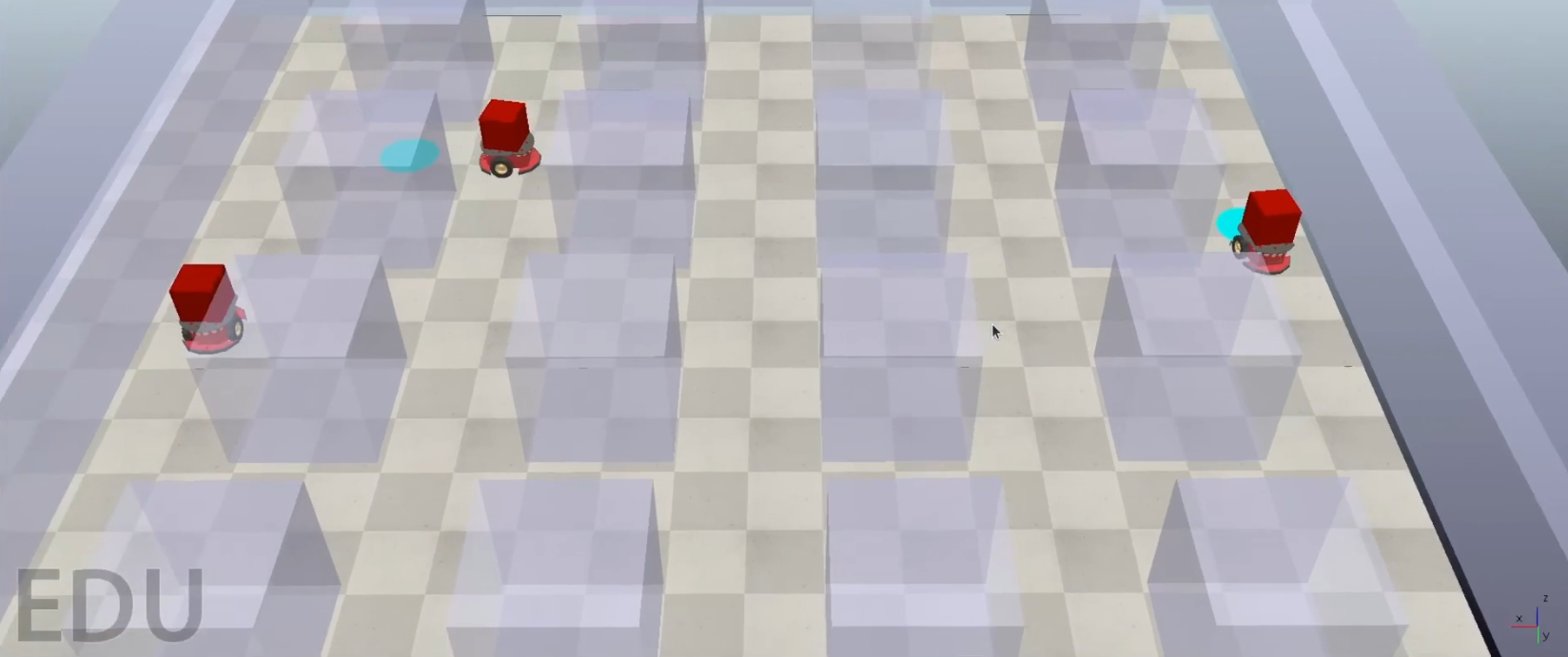
This project was completed as part of the Motion Planning course.
We explored various path planning algorithms for multi-agent systems and studied their
effectiveness by simulating them in CoppeliaSim. The main goal of the project was to solve
warehouse logistics challenges using multiple robots working collaboratively.